
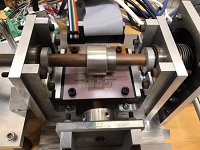
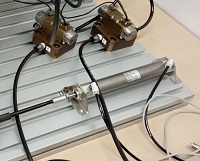
リニアボールガイドの転がり摩擦が位置決めに及ぼす影響 / 超音波加振の影響
工作機械などの案内として採用されるリニアボールガイドには転がり摩擦が生じ,高精度な位置決めの達成を困難にします.その具体的な影響を調査しています.また,リニアガイドに超音波振動を与えることによって摩擦力が低減することを利用した位置決め制御法についても検討しています.
磁気歯車による非接触動力伝達時の位置決め特性
磁石の吸引力(N-S極の引き合う力)を利用して直交軸に回転運動を変換した際の位置決めについて調査しています.
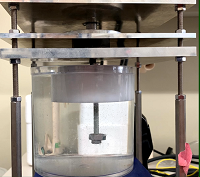
非接触動力伝達攪拌機の開発
磁石の吸引力(N-S極の引き合う力)を利用して隔壁での回転運動伝達を目指しています.

磁気力および超電導磁気の動力伝達
磁石対による非接触動力伝達の特性を調査しています.磁石の代わりに超電導体を用いた特性についても調査しています.

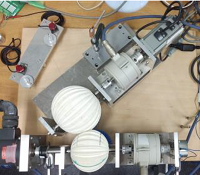
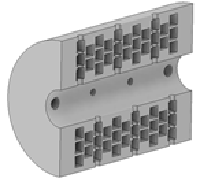
球体歯車の伝達特性
関節のように多自由度の動作および確実な動力を伝達させる歯車機構について諸特性の把握および最適形状の調査しています.
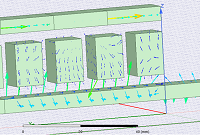
磁気リニアアクチュエータの開発
上下に磁石列を配置し中央に中間磁性媒体(鋼材)を配置した新しい形態のリニアアクチュエータについて解析しています.
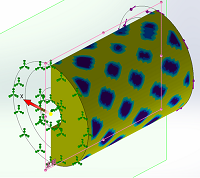
機械要素の形状最適化
従来にない機能を付加された機械要素を開発しています.
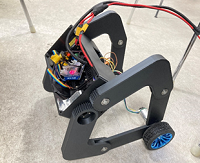
倒立振子二輪移動ロボット
二輪移動型の倒立振子ロボットを製作しています.


PLCを用いたFAに関する研究
産業用コントローラであるPLCを用いて,スイッチやセンサなどの入力信号によりベルトコンベアやモータを駆動させます.

磁気歯車による非接触パラメカの開発
磁気歯車と磁石板にて直動ジョイントを構成し,非接触動力伝達によるパラメカを開発しています.
空気圧シリンダの精密位置決め
空気圧シリンダによる精密位置決め法の検討をしています.